4个麦克纳姆轮的控制原理主要依赖于其特殊的设计和精确的速度控制,以实现全方位移动。
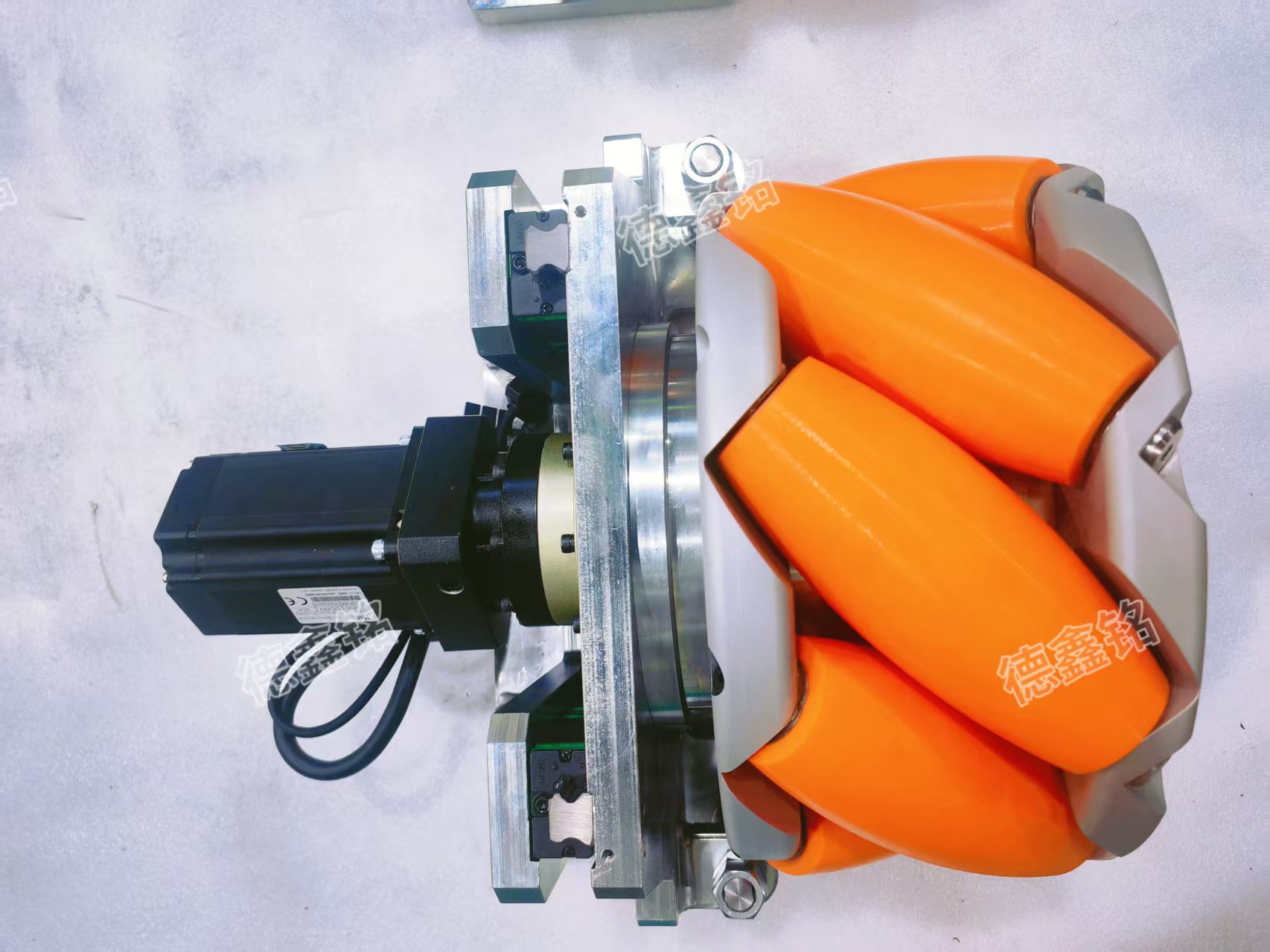
麦克纳姆轮是一种特殊的轮子设计,它允许机器人在多个方向上进行运动,而不仅仅是前进和后退。这种轮子的设计原理基于轮子上的特殊滚动方式,使得机器人可以同时进行多个方向的运动,从而实现更灵活的移动能力。麦克纳姆轮由一组交叉的滚轮组成,每个滚轮都可以独立地旋转,这使得机器人的移动方向和速度可以通过控制每个轮子的旋转方向和速度来精确调节。具体到4个麦克纳姆轮的控制,关键在于如何通过控制这些轮子的旋转方向和速度来实现全方位移动。这种控制可以通过使用电机来控制车轮旋转实现,虽然这使得控制变得更加复杂,但它提供了更高的灵活性。通过精确地控制各个轮子转动的速度,可以实现全向移动,即机器人在任何方向上移动而无需转弯或调整方向。
此外,麦克纳姆轮小车的运动特点还包括其灵活性和可控性,这使得它在机器人控制和移动方案中成为理想的选择。通过适当的算法和控制器,可以实现对麦克纳姆轮小车的精确控制,从而实现各种复杂的移动任务。
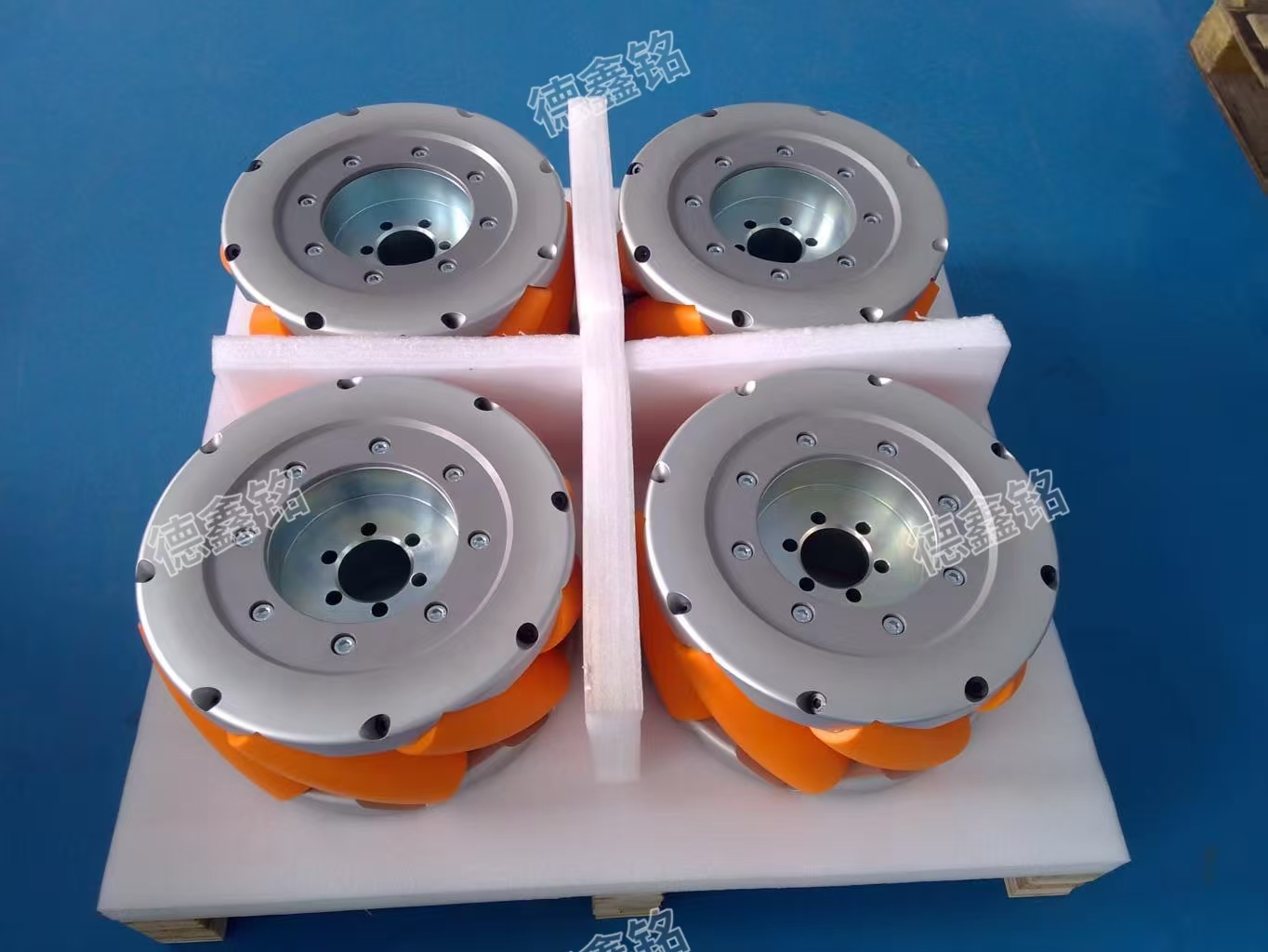
麦克纳姆轮是一种可以全向移动的全向轮,由轮毂和围绕轮毂的辊子组成,辊子轴线和轮毂轴线夹角成45度。在轮毂的轮缘上斜向分布着许多小轮子,即辊子,故轮子可以横向滑移。
4个麦克纳姆轮的控制原理如下:
1.向前运动:1、2、3、4轮都正转,小车前进;反之则正转。
2.向右运动:1、3轮正转,2、4轮反转,小车向右运动;反之则向左运动。
3.顺时针旋转:1、2轮正转,3、4轮反转,小车顺时针原地旋转;反之则逆时针原地旋转。
通过控制麦克纳姆轮的转动方向,可以控制小车的运动方向和旋转方向。
综上所述,4个麦克纳姆轮的控制原理涉及到精确的速度控制和方向调节,通过独立控制每个轮子的旋转方向和速度,实现全方位移动和高度灵活的移动能力。
4个麦克纳姆轮的控制原理主要依赖于其特殊的设计和精确的速度控制,以实现全方位移动。
平等互利,相互协作,在持续合作中共同发展。
电话:165-3822-8877
132-0639-7587
166-5322-7575
邮箱:13792842937@163.com
地址:青岛市黄岛区钱塘江路369号麦克纳姆轮研发中心
地址:山东省青岛市黄岛区千山北路与步云路交叉口东南方向720米左右麦克纳姆轮生产基地