摘要:
本文主要研究了基于麦克纳姆轮全向移动的分析与仿真。首先,介绍了麦克纳姆轮的结构和原理,分析了它的优势和应用场景:然后,提出了麦克纳姆轮全向移动的数学模型,并通过仿真实验验证了模型的可靠性和准确性;最后,介绍了麦克纳姆轮全向移动的一些实际应用,并展望了未来的发展趋势和研究方向。
1.引言
随着工业自动化、智能制造、物流配送等行业的快速发展,机器人和智能设备的应用越来越广泛。而机器人移动能力的优化和提升,是机器人性能改善的重要方向之一。麦克纳姆轮是一种具有全向移动能力的轮子,可以使机器人具有非常高的机动性和灵活性。因此,麦克纳姆轮全向移动成为了智能装备制造、空间探测、救援机器人等领域的热门研究方向。
2.麦克纳姆轮全向移动的原理和优势
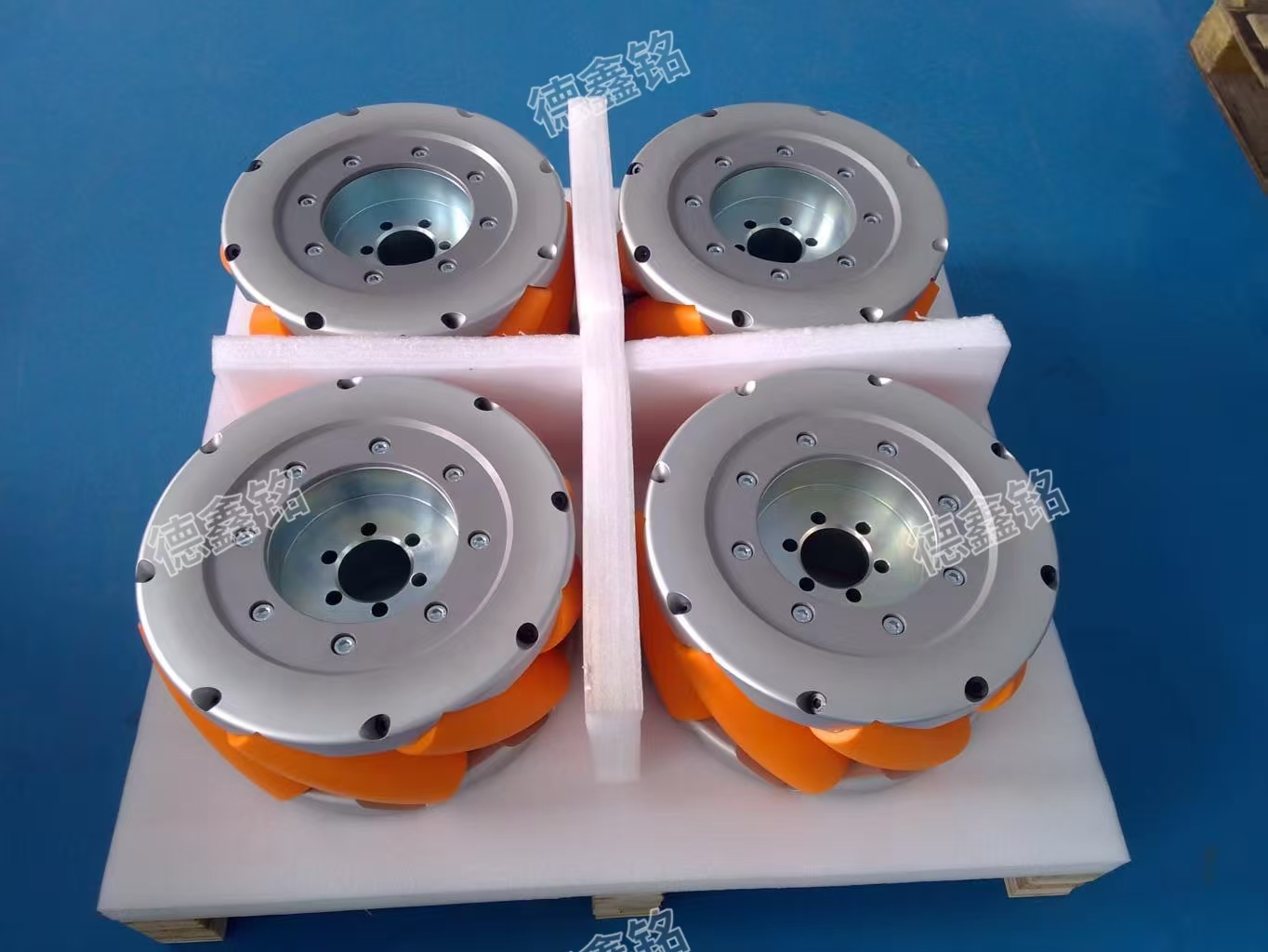
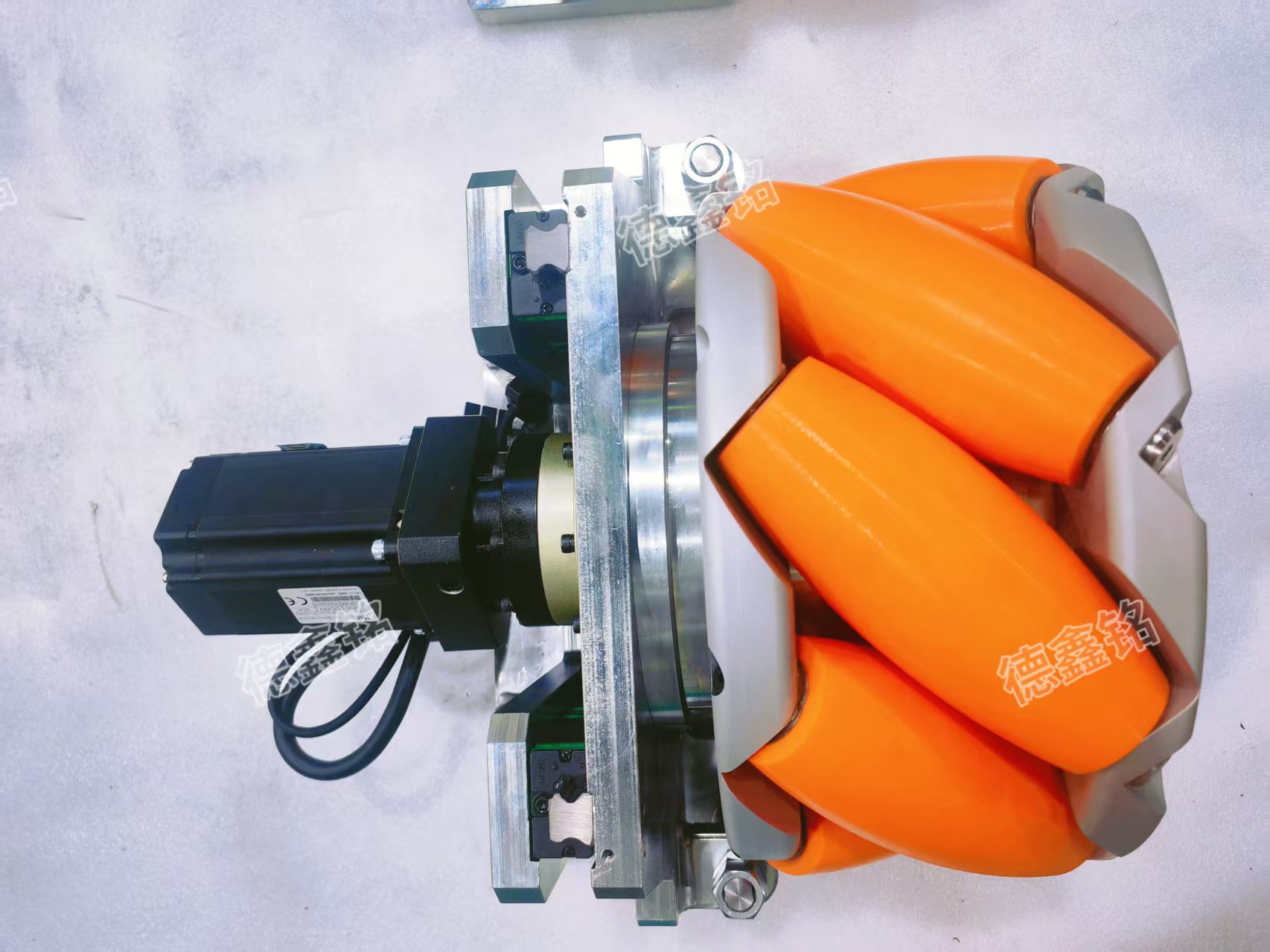
麦克纳姆轮是由一组交叉排列的轮子组成的,每个轮子分离出两个90度相位的马达,可分别控制不同方向、不同速度的转动。从而产生前进、后退、左右平移、自转等多种运动方式。与传统的车轮相比,麦克纳姆轮具有很多优势:首先,它的机动性和灵活性非常高,具备极强的环境适应能力。其次,麦克纳姆轮控制简单,只需要控制每个轮子的转速和转向即可,能够实现高效的避障和导航。最后,在低速运动时,克纳姆轮非常平稳,不会产生震动和颠簸,可以保证机器人的可靠性和安全性。
3.麦克纳姆轮全向移动的数学模型
麦克纳姆轮全向移动的数学模型很复杂,涉及到多个轮子的运动学和动力学,需要进行精细的建模和分析。此处只作简要介绍,详细内容请参见相关文献。
首先,对于一个三轮麦克纳姆轮机器人,可以建立如下运动学模型:
v1= vx +vy+wl.
v2 =vx-vy-wl.
v3= vx- vy+wl.
其中,vi表示每个轮子的线速度,vx和 vy分别表示机器人的x、y方向速度,wL表示机器人的自转角速度。通过上述公式,可以计算出每个轮子需要的线速度,从而实现机器人的运动控制。
4.麦克纳姆轮全向移动的仿真实验
为了验证上述模型的准确性和可靠性,本文进行了麦克纳姆轮全向移动的仿真实验。采用Matlab软件对三轮麦克纳姆轮机器人进行建模和仿真,并模拟机器人在不同场景下的运动轨迹和速度变化。实验结果表明,麦克纳姆轮全向移动的数学模型非常准确,可以很好地预测机器人的运动状态和速度变化。
5.麦克纳姆轮全向移动的应用和发展前景
麦克纳姆轮全向移动具有非常广泛的应用前景,可以用于智能控制、机器人导航、空间探测、救援救援等领域。例如,可以用于制造高精度的电子元器件、智能家居控制、自动化仓储管理等;可以用于制造全向移动的机器人、无人机、水下机器人等;可以用于制造广泛应用于军事、医疗、救援等领域的机器人,大大提高机器人的响应速度和敏捷性。
总之,麦克纳姆轮全向移动是一种非常先进、实用的机器人移动技术,具有广泛的应用前景。未来,我们可以通过对其数学模型、控制算法的研究改进,加快技术创新,推动智能装备制造、智能化制造、智能化物流等领域的发展。
平等互利,相互协作,在持续合作中共同发展。
电话:165-3822-8877
132-0639-7587
166-5322-7575
邮箱:13792842937@163.com
地址:青岛市黄岛区钱塘江路369号麦克纳姆轮研发中心
地址:山东省青岛市黄岛区千山北路与步云路交叉口东南方向720米左右麦克纳姆轮生产基地