在工业自动化与高端装备升级的浪潮中,全向移动技术已成为突破空间限制、提升作业效率的核心支撑。青岛德鑫铭机械科技有限公司作为深耕精密机械领域的高新技术企业,凭借与高校合作研发的高精度麦克纳姆轮,为20余个行业提供全向移动解决方案,其产品以高载荷、高稳定性、高精度的优势,广泛应用于航天、核电、智能仓储等关键领域。本文将深度解析青岛德鑫铭麦克纳姆轮的核心工作原理,揭开其实现360°全向灵动移动的技术奥秘。
一、麦克纳姆轮基础认知:打破传统移动边界的核心部件
青岛德鑫铭深耕麦克纳姆轮研发8年,结合上千家客户的实际应用反馈,对传统麦克纳姆轮进行结构优化与性能升级,打造出适配不同载重、不同速度需求的全系列产品,年产可达3000吨,凭借低成本、高质量的特性,已服务海内外三百余家企业,成为中国智造全向移动领域的标杆力量。
二、核心结构:青岛德鑫铭麦克纳姆轮的“三位一体”设计
麦克纳姆轮的全向运动能力,源于其精密的结构组合。青岛德鑫铭麦克纳姆轮采用“主轮主体-斜向辊子-驱动连接系统”三位一体的核心结构,各模块协同运作,既保证承载强度,又实现精准的力传递与运动控制,区别于传统轮式的单一结构设计,凸显其技术专业性与实用性。
(一)主轮主体:承载与动力传递的核心框架
主轮主体作为麦克纳姆轮的基础承载部件,直接决定产品的载重能力与运动稳定性。青岛德鑫铭根据不同行业工况需求,采用差异化材质与结构设计:重载场景(如核电检修、重型设备搬运)采用高强度铝合金、合金钢材质,内置加强筋提升刚性,避免重载下形变;轻载场景(如小型服务机器人)采用增强尼龙、聚甲醛等工程塑料,兼顾轻量化与成本优势。
其圆筒状轮毂外周均匀分布卡槽与轴孔,为斜向辊子提供稳定安装基础,同时承接驱动系统的转矩,确保动力高效传递,搭配精密加工工艺,保障轮体旋转的平稳性,为后续力的分解与合成奠定基础。
(二)斜向辊子:全向运动的“关键执行器”
斜向辊子是实现全向移动的核心,也是青岛德鑫铭麦克纳姆轮的技术优化重点。辊子均匀分布在主轮主体外周,可绕自身轴线自由转动,其倾斜角度、数量与形态直接决定运动灵活性与稳定性。
青岛德鑫铭采用45°通用倾斜角度设计,在横向与纵向运动能力之间实现最佳平衡,同时可根据客户需求定制30°(侧重纵向驱动力)、60°(强化横向移动)两种特殊角度;辊子数量控制在8-12个,沿主轮外周对称排列,确保轮体与地面接触受力均衡,减少运动颠簸;材质选用橡胶、聚氨酯等弹性材料,兼具耐磨性与缓冲性,适配不同地面环境,同时降低运动噪音。
尤为关键的是,辊子母线采用等速螺旋线设计,确保主轮旋转时,所有辊子的外包络面形成完整圆柱面,避免出现卡滞、跳动,实现设备平稳运行,这一设计也让青岛德鑫铭麦克纳姆轮在精密制造装配场景中,能实现微米级精准对接。
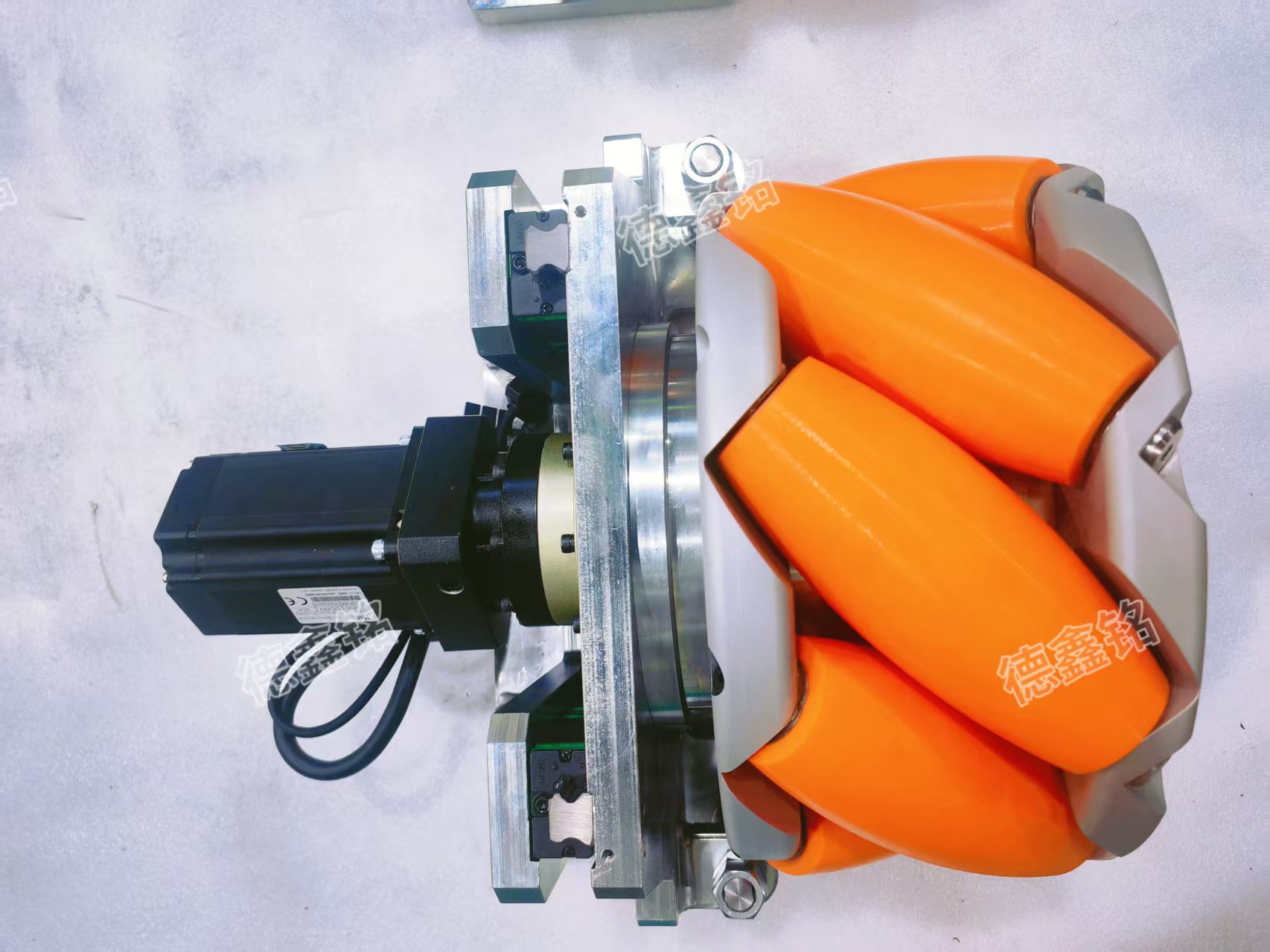
(三)驱动连接系统:多轮协同的“动力中枢”
麦克纳姆轮的全向运动需多轮协同控制,青岛德鑫铭的驱动连接系统通过“连接部件+独立驱动单元”的组合,实现动力精准传递与各轮独立可控。连接部件采用轴承连接,减少辊子转动摩擦,提升使用寿命;主轮与驱动单元的连接可灵活选择刚性连接或传动带、齿轮传动,适配不同速度与扭矩需求。
每个麦克纳姆轮均配备独立驱动电机,可根据场景需求选用直流无刷电机(效率高、寿命长,适用于中高端设备)或步进电机(定位精度极高,适用于低速精密控制),搭配青岛德鑫铭自主研发的动态控制算法与高精度编码器,实现毫米级定位精度,确保多轮转速、转向的精准协同,这也是其产品区别于普通麦克纳姆轮的核心优势之一。
三、核心工作原理:力的分解与合成,解锁全向移动密码
青岛德鑫铭麦克纳姆轮的全向移动能力,本质是通过精密结构设计,实现摩擦力的精准分解与合成——单个轮体产生斜向分力,多轮协同将分力合成所需运动方向,无需转向机构,即可实现全方位灵活移动,其核心逻辑可分为“单个轮体的力分解”与“多轮协同的力合成”两个层面。
(一)单个轮体:斜向辊子的“力分解魔法”
当单个麦克纳姆轮在驱动电机带动下旋转时,边缘的斜向辊子与地面接触产生摩擦力。由于辊子与主轮轴线呈45°倾斜,这一摩擦力会被精准分解为两个相互垂直的分力:一是沿主轮切线方向的“纵向分力”,用于推动设备前进或后退;二是沿辊子轴线方向的“横向分力”,为横向移动、斜向移动提供动力。
值得注意的是,辊子可被动旋转,当横向分力作用时,辊子绕自身轴线转动,有效减少横向移动阻力,确保运动顺畅;而纵向分力则直接驱动主轮旋转,带动设备产生纵向运动。单个轮体的旋转无法实现直线运动,仅能产生斜向运动趋势,因此需4个轮体协同工作,通过分力的叠加与抵消,实现多种运动模式。
(二)多轮协同:分力合成的“协同逻辑”
青岛德鑫铭麦克纳姆轮通常采用4个轮体按矩形布局组合使用,分为左旋、右旋两种类型,呈镜像对称安装(常见左前、右后轮为左旋轮,右前、左后轮为右旋轮)。通过控制系统精准调节每个轮体的转速与转向,让各轮产生的分力相互合成或抵消,即可实现任意方向的运动,以下为4种典型运动模式的核心逻辑:
1. 直线前进/后退:4个轮体以相同转速、相同方向(均顺时针或均逆时针)旋转,左右两侧轮体产生的横向分力相互抵消(左侧横向分力向右,右侧横向分力向左,大小相等、方向相反),所有轮体的纵向分力叠加形成合力,推动设备沿直线平稳前进或后退,适用于长距离物料转运场景。
2. 横向平移(蟹行):这是麦克纳姆轮最具代表性的运动模式。以向右横向平移为例,左侧两个轮体顺时针旋转,右侧两个轮体逆时针旋转,此时左右两侧轮体的横向分力均向右叠加,纵向分力相互抵消(左侧纵向分力向前,右侧纵向分力向后),设备即可实现无转向横向平移,大幅节省通道空间,适配智能仓储货架间的横向移库需求。
3. 零半径原地旋转:左侧两个轮体顺时针旋转,右侧两个轮体逆时针旋转(或反之),左右两侧轮体的纵向分力与横向分力均相互抵消,形成旋转力矩,驱动设备绕自身中心轴360°原地旋转,无需预留转向空间,适用于狭窄廊道、车间角落等空间受限场景,如消防机器人、核电检修车的灵活转向。
4. 斜向移动:通过调节4个轮体的转速与转向,使纵向分力与横向分力均不相互抵消,合成斜向合力,推动设备沿任意斜向方向(如45°、135°)移动,可灵活避障,适配精密制造中多工位对接、舞台演艺中动态编队等场景。
四、青岛德鑫铭技术优势:原理落地的核心保障
青岛德鑫铭麦克纳姆轮之所以能在多个高端领域实现规模化应用,核心在于其将基础原理与行业需求深度结合,在结构设计、控制精度、定制化能力上形成差异化优势,让全向移动技术真正落地见效:
• 高精度控制:集成高精度编码器与自主研发的动态控制算法,实现毫米级定位精度,解决普通麦克纳姆轮定位偏差大的痛点,适配精密制造、航天设备对接等严苛场景。
• 高适应性:针对不同工况需求,提供防爆、耐腐蚀、超静音等定制化设计,辊子材质可灵活替换,适配水泥地、无尘车间地板等不同地面环境,同时具备抗偏载、低震动、高响应的性能优势。
• 全场景适配:覆盖全载重范围,可集成于AGV小车、特种机器人、大型舞台设备等各类装备,提供轮组结构设计、驱动控制系统集成、多轮协同调度等一站式解决方案,已成功应用于航天、汽车、港口等20余个行业标杆项目。
• 高稳定性:通过对称辊子布局、加强筋结构设计及严格的质量检测,确保轮体在长期重载、高频运动下不易形变、卡滞,结合高校合作研发的技术优势,产品稳定性远超行业平均水平。
五、总结:以技术创新,解锁全向移动新可能
青岛德鑫铭麦克纳姆轮的核心工作原理,是通过“三位一体”的精密结构设计,实现摩擦力的精准分解与多轮协同合成,打破传统轮式移动的边界,让设备实现360°全向灵动移动。其背后是青岛德鑫铭8年深耕的技术积累、与高校合作的研发优势,以及对行业需求的深刻洞察——从结构优化到控制精度提升,从标准化产品到定制化解决方案,每一处升级都围绕“实用、高效、稳定”的核心,让全向移动技术真正赋能各行各平等互利,相互协作,在持续合作中共同发展。
电话:165-3822-8877
132-0639-7587
166-5322-7575
邮箱:13792842937@163.com
地址:青岛市黄岛区钱塘江路369号麦克纳姆轮研发中心
地址:山东省青岛市黄岛区千山北路与步云路交叉口东南方向720米左右麦克纳姆轮生产基地